
Reinforcement Learning¶
Our paper DriverGym: Democratising Reinforcement Learning for Autonomous Driving has been accepted at ML4AD Workshop, NeurIPS 2021.
In this series of notebooks you will train and evaluate reinforcement learning policies in DriverGym.
Before starting, please download the Woven by Toyota Prediction Dataset 2020 and follow the instructions to correctly organise it.
DriverGym Environment¶
From the paper:
`
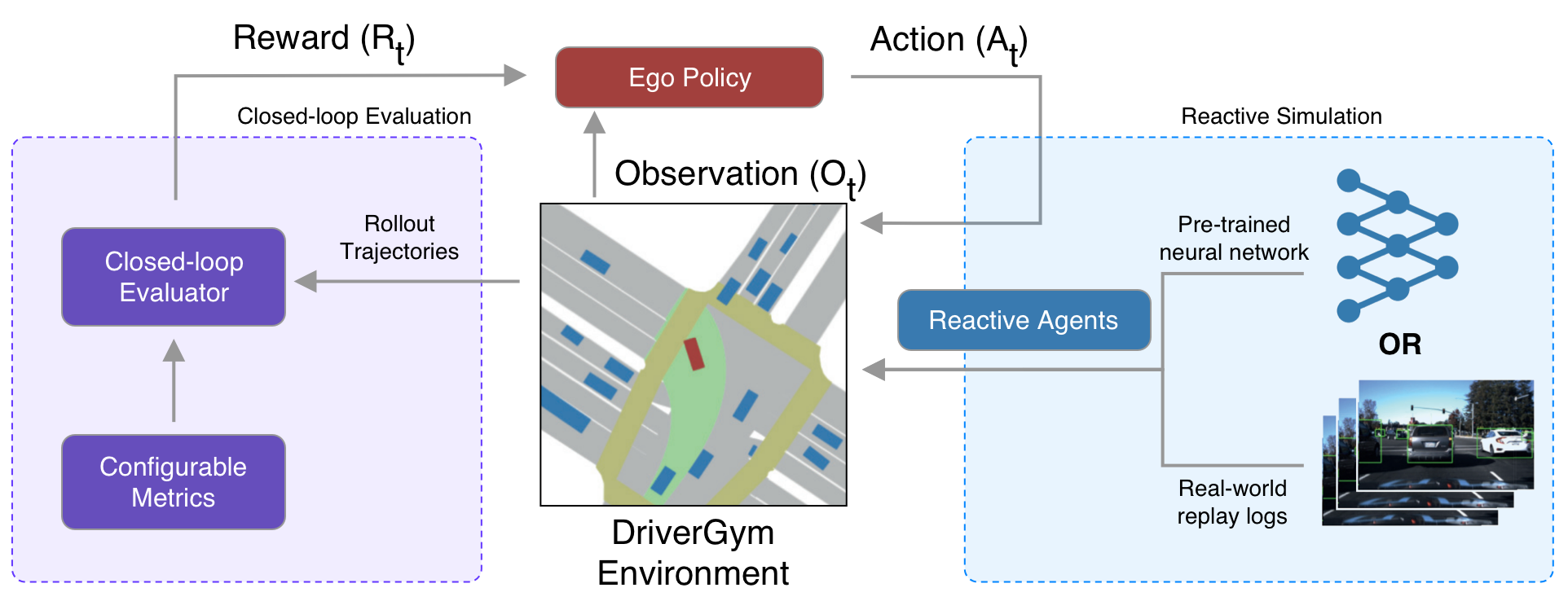
DriverGym is an open-source gym environment that enables training RL driving policies on
real-world data. The RL policy can access rich semantic maps to control the ego. Other agents
can either be simulated from the data logs or controlled using a dedicated policy pre-trained
on real-world data. We provide an extensible evaluation system with easily configurable
metrics to evaluate the idiosyncrasies of the trained policies.
`
Notebook Tutorial¶
We provide two notebooks introducing our DriverGym environment.
You can test your RL policy in DriverGym using our gym notebook
You can also train and test a PPO policy in DriverGym using our PPO notebook